

博主张根源,租了4台机器人,想测评在现实生活中机器人的表现(点击)目前国内机器人测评
网上的这段内容,把当下AI和机器人领域的“皇帝新衣”撕开了一个口子。让我们顺着这个切口,深挖一下。
春晚机器人的“谎言”与真相
你看到春晚舞台上整齐划一、行云流水的机器人表演了吗?那确实是技术实力的展示——但那是“编程的胜利”,不是“智能的胜利”。
博主张根源租了4台机器人想看看它们在现实生活中的表现,结果“个个跟机器残疾人一样”。这不奇怪。因为:
舞台上的动作,是预设的、封闭环境的、无限次排练的
现实生活是开放的、不确定的、需要实时决策的
张根源的测评不是黑科技,而是把机器人从“温室”扔进了“野外”。
当机器人面对不确定环境时,它需要:
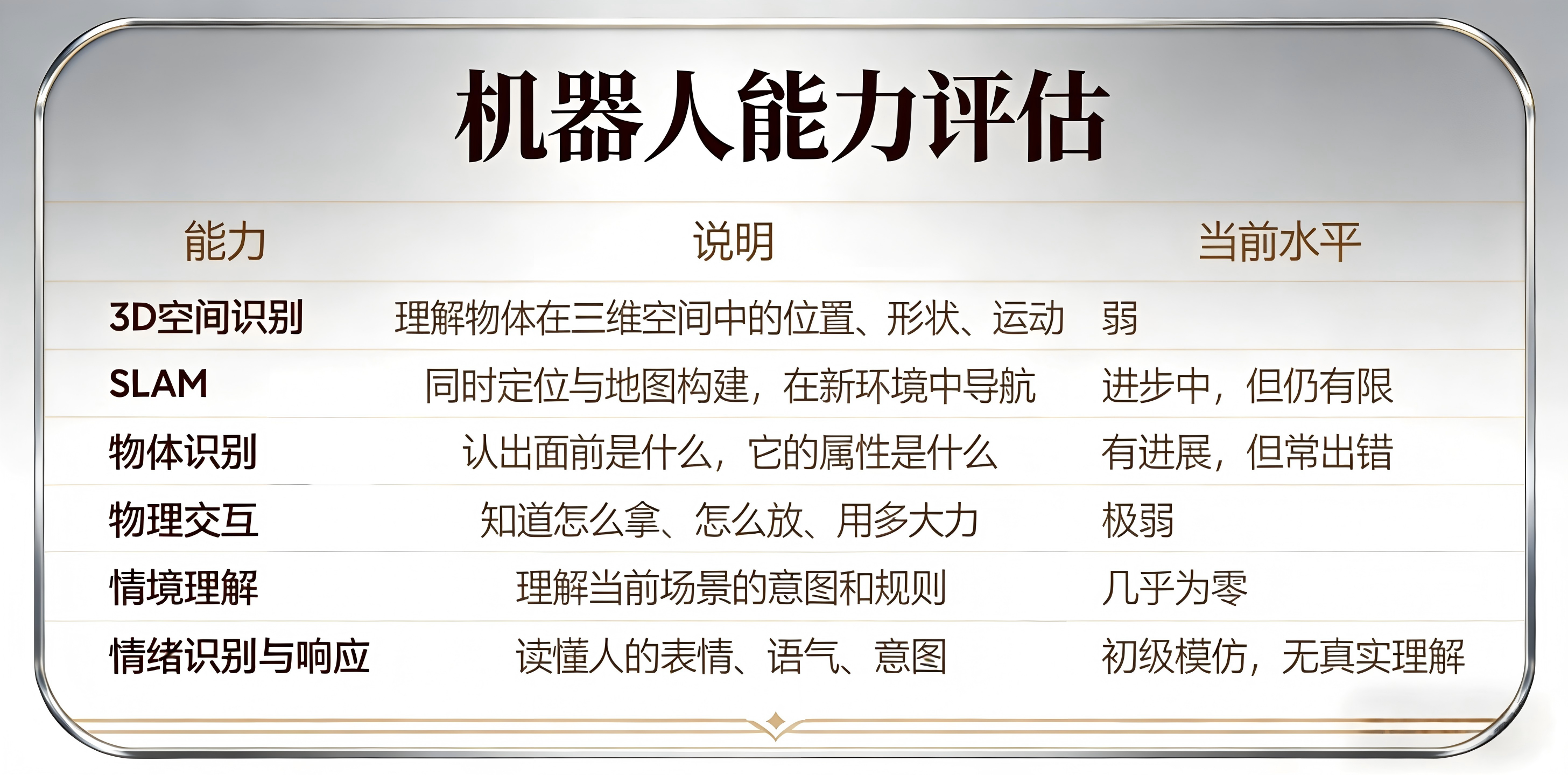
这些能力,恰恰是空间智能的范畴——李飞飞教授一直强调的那个方向。
为什么“语言大模型”还不够?
语言大模型(如ChatGPT)的本质,是从海量文本中学习符号之间的统计规律。
它知道“杯子掉在地上会碎”这句话的概率很高,但它从来没见过杯子,没听过碎的声音,没感受过碎片溅到手上的痛。
它知道“是什么”,但它不理解“为什么”,更不知道“怎么做”。
这就是为什么:
AI能写出关于“如何做菜”的完美文案,但它不会颠勺
AI能设计出看似合理的建筑图纸,但它不会考虑材料的物理特性
AI能模拟机器人的动作序列,但它无法应对一个突然出现的小孩或一只滚过来的球
李飞飞的判断是对的:AI的下一个前沿,是空间智能——让机器理解物理世界、在物理世界中行动、与物理世界交互。
而这个判断的反面,恰恰揭示了人类的独特优势:我们天生就是空间智能的携带者。
人类日常的“复杂场景”,是空间智能的战场
我们每天处理的“日常”,其实都是超级复杂的空间智能任务:
倒一杯水:你需要判断杯子的位置、水壶的倾斜角度、水流的速度、何时停止。你不需要思考,因为你的空间智能系统在毫秒级完成计算。
接住扔过来的钥匙:你需要预测抛物线的轨迹、判断自己手的位置、调整速度和角度。这套系统比任何机器人灵巧。
在人群中穿行:你需要同时追踪几十个人的运动轨迹,预测他们的下一步,规划自己的路径。这是超级复杂的空间导航。
读懂对方的表情:你需要识别微表情、结合语境、判断意图、调整自己的回应。这是社交智能,是空间智能的“社交版本”。
这些能力,我们从来不需要“教”——它们是在数百万年的进化中,通过无数次的试错、反馈、迭代,刻进我们基因里的。
而机器人要获得这些能力,需要:
空间智能算法:实时3D感知、运动规划、物理推理
具身经验积累:像人类婴儿一样,在真实世界中不断试错
多感官整合:视觉、触觉、听觉、本体感觉同步处理
社会智能:理解意图、读懂情绪、协同合作
这就是为什么说“让机器人服务人类,还早着呢”。
这对我们的孩子意味着什么?
如果机器人连“倒一杯水”都这么难,那我们为什么要让孩子花大量时间去背那些机器人能轻松学会的东西?
机器人可以在一秒内记住所有公式,但孩子需要几年
机器人可以写出一篇语法完美的作文,但孩子需要反复练习
机器人可以解出复杂的方程,但孩子需要不断刷题
机器人学不会的,恰恰是那些我们觉得“不需要学”的东西:
在不确定环境中做决策
在复杂空间中找到路径
在社交互动中读懂情绪
在失败后爬起来继续尝试
在合作中找到自己的位置
这些能力,才是孩子未来的“护城河”。
对我们来说太“自然”了,自然到我们忘了它也是需要训练和保护的。
认知工坊的位置
承认进步,该夸得夸,但不能无脑
春晚机器人确实进步很大,值得肯定。但更值得思考的是:进步的方向是什么?
如果方向是让机器人更像人类,那人类该往哪走?
李飞飞的答案是:让AI拥有空间智能。
而我的答案更简单:让人类的孩子,不要失去他们与生俱来的空间智能。
在真实世界中摸爬滚打;
在物理挑战中建立因果直觉;
在团队协作中练习社交判断;
在失败中学会迭代。
这些,就是认知工坊在做的事。
不是教孩子成为“第二个机器人”,而是教孩子成为“机器人永远成为不了的人”。
最后
张根源的测评,撕开了机器人“无所不能”的面纱。 李飞飞的研究,指明了AI发展的真正方向。
再次确认:在AI时代,最宝贵的能力,恰恰是最“不AI”的那些——空间智能、社交智能、在不确定中找路的能力。
机器人还在学走路,我们的孩子已经在奔跑。 但如果我们用“标准答案教育”把他们锁进笼子,他们就会和机器人一样,在真实世界中变成“残疾”。
让孩子的空间智能,在真实世界中尽情生长。这是认知工坊的使命,也是我写这篇文章的原因。
认知工坊,为不确定的未来,培养确定的能力。
